Regelungstechnik 1
Bachelor Maschinenbau
Die Lehrveranstaltung Regelungstechnik 1 gliedert sich in die Vorlesung Regelungstechnik 1, die Übung Computer Aided Control Engineering 1 (CACE 1) und die Laborübung Regelungstechnik 1. Es werden folgende Inhalte thematisiert:
- Signalflussbild
- Übertragungselemente
- Lösung von DGL’s und LAPLACE-Transformation
- Übertragungs- und Frequenzgangfunktion, BODE-Verfahren
- Stabilität von Regelkreisen (NYQUIST-Kriterium, Pol-Nullstellenplan)
- Kaskadenregelung
Weitere Informationen für Studierende
Regelsysteme im Zustandsraum
Master Ressourceneffizienz im Maschinenbau
Die Lehrveranstaltung Regelsysteme im Zustandsraum gliedert sich in die Vorlesung und die begleitende Laborübung. In der Lehrveranstaltung werden folgende Inhalte thematisiert:
- Beschreibung dynamischer Systeme im Zustandsraum
- Zustandsrückführung und Führungsgrößenaufschaltung
- Entwurfsmethoden für Zustandsregler wie Polvorgabe und Optimale Regelung (LQ-Regler)
- Zustandsregelung mit Integral-Regler
- Zustands-Beobachter
Weitere Informationen für Studierende:
Roboter-Digitalisierung und Simulation

Master Ressourceneffizienz im Maschinenbau
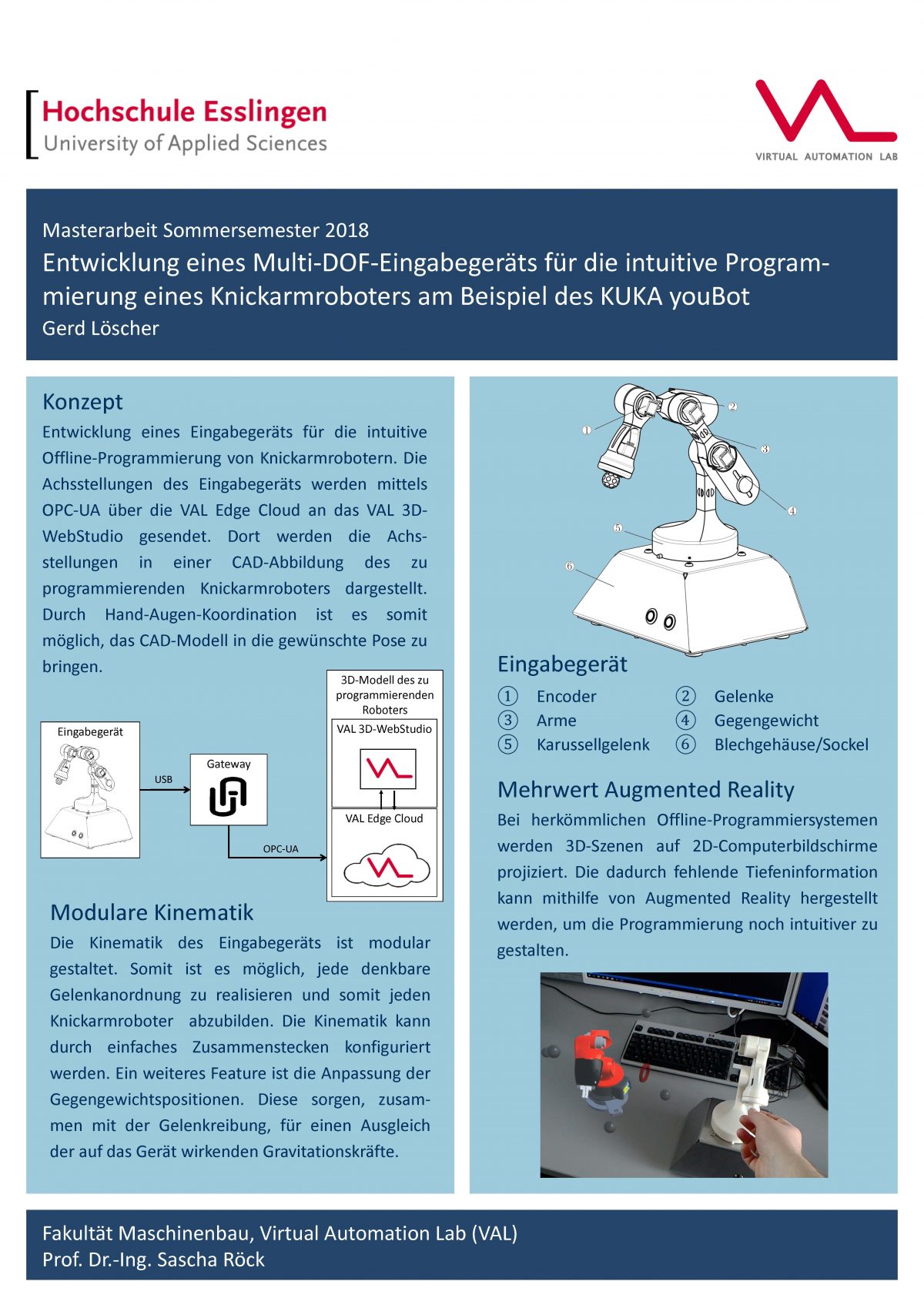
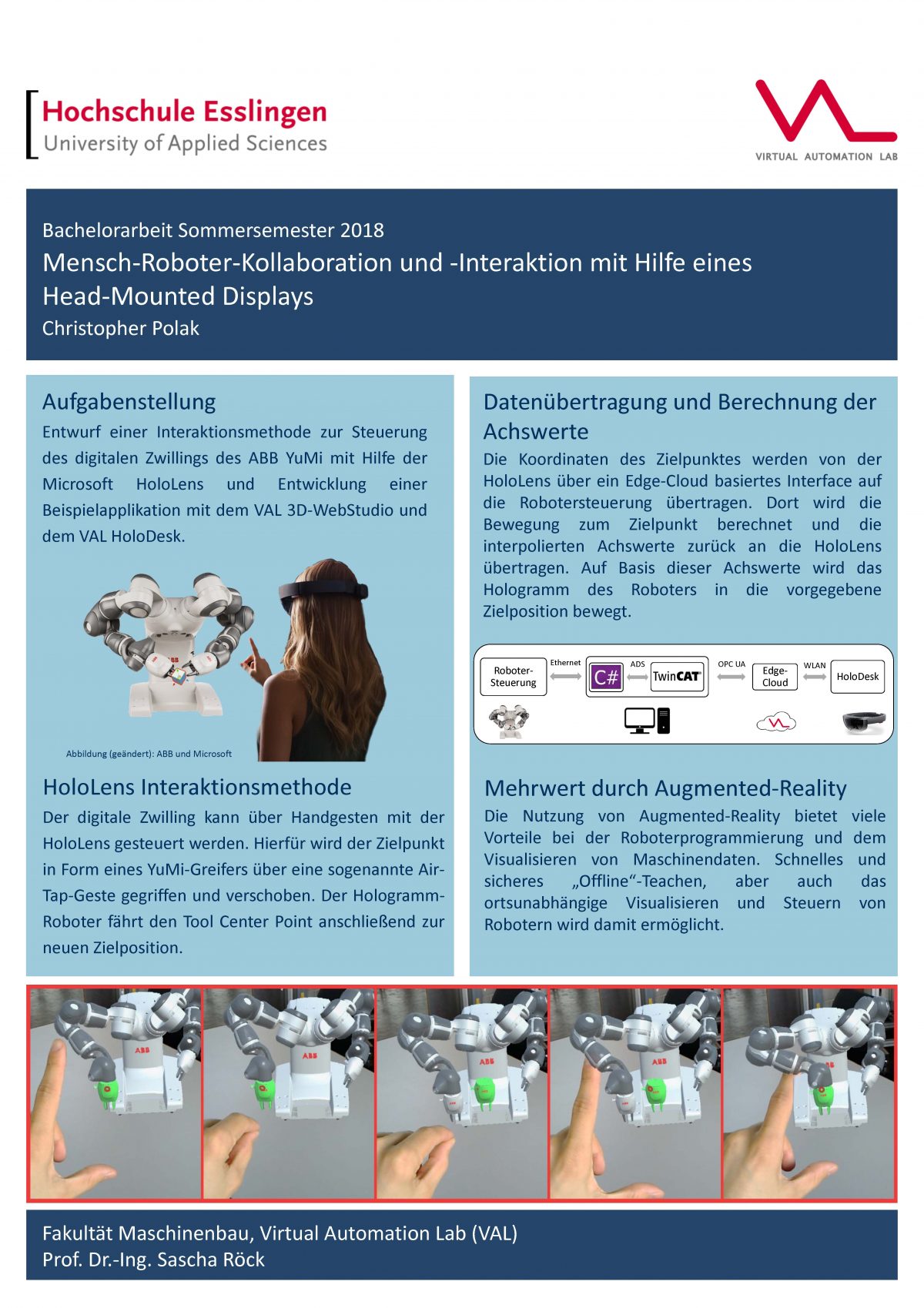
Die Lehrveranstaltung "Roboter-Digitalisierung und Simulation" gliedert sich in die Vorlesung und die begleitende Laborübung. In der Lehrveranstaltung werden folgende Inhalte thematisiert:
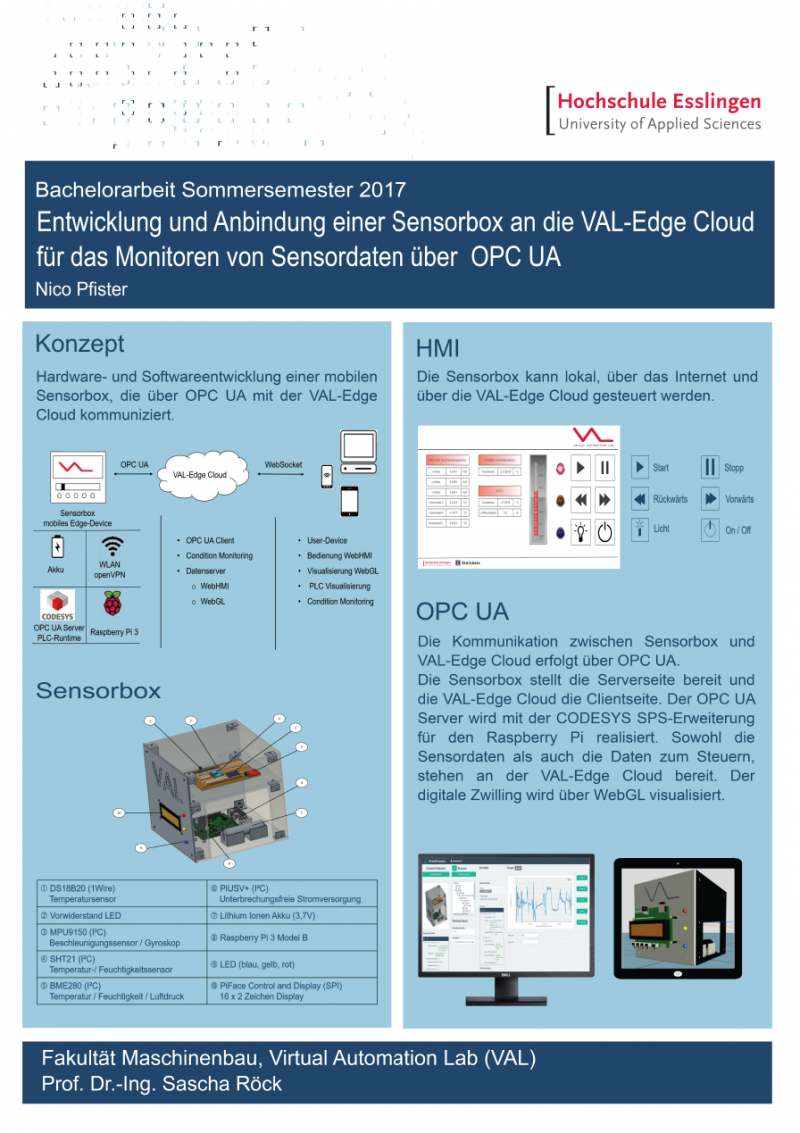
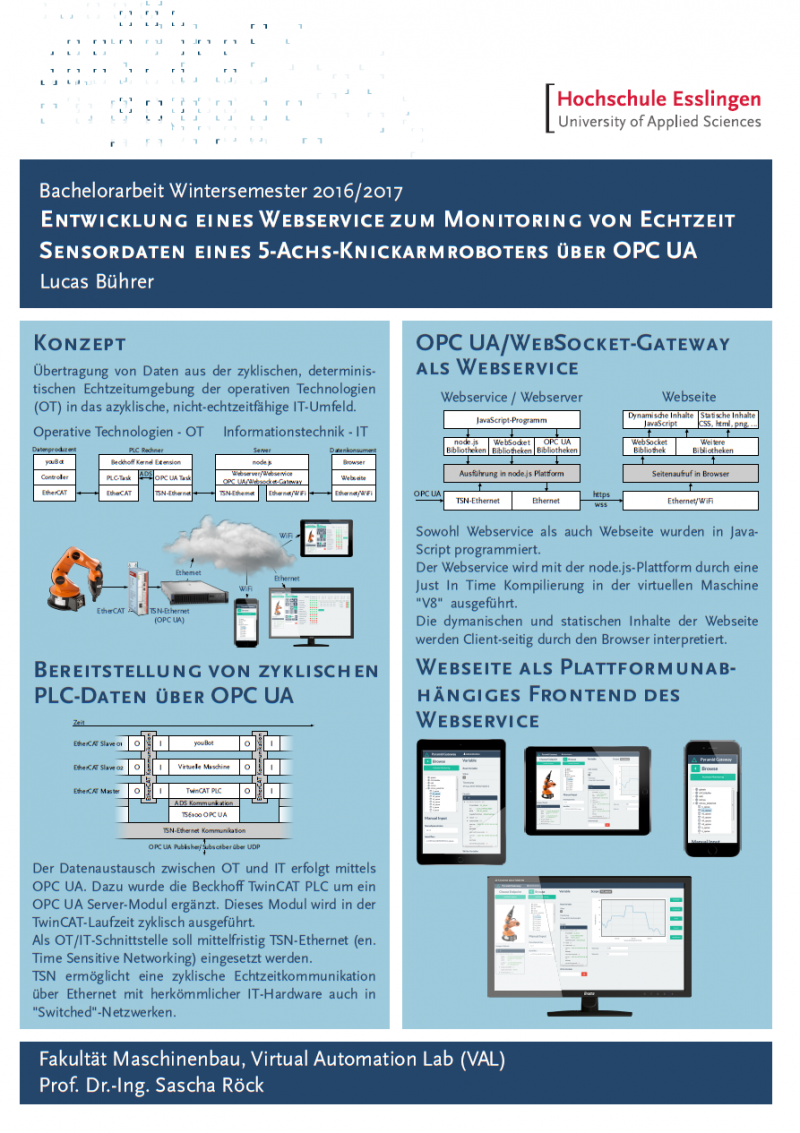
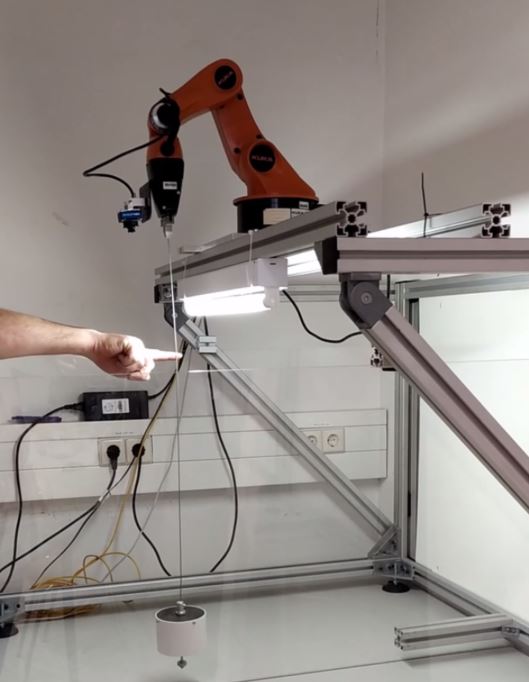
- Digitaler Zwilling eines Robotersystems (Digital Twin)
- Modellierung und Simulation
- Kinematik und Numerik
- Dynamik und Numerik
- Informationstechnische Grundlagen für eine Digital Twin as a Service Plattform
- Kommunikation und Vernetzung
- Cloud-Computing und Web-Technologien
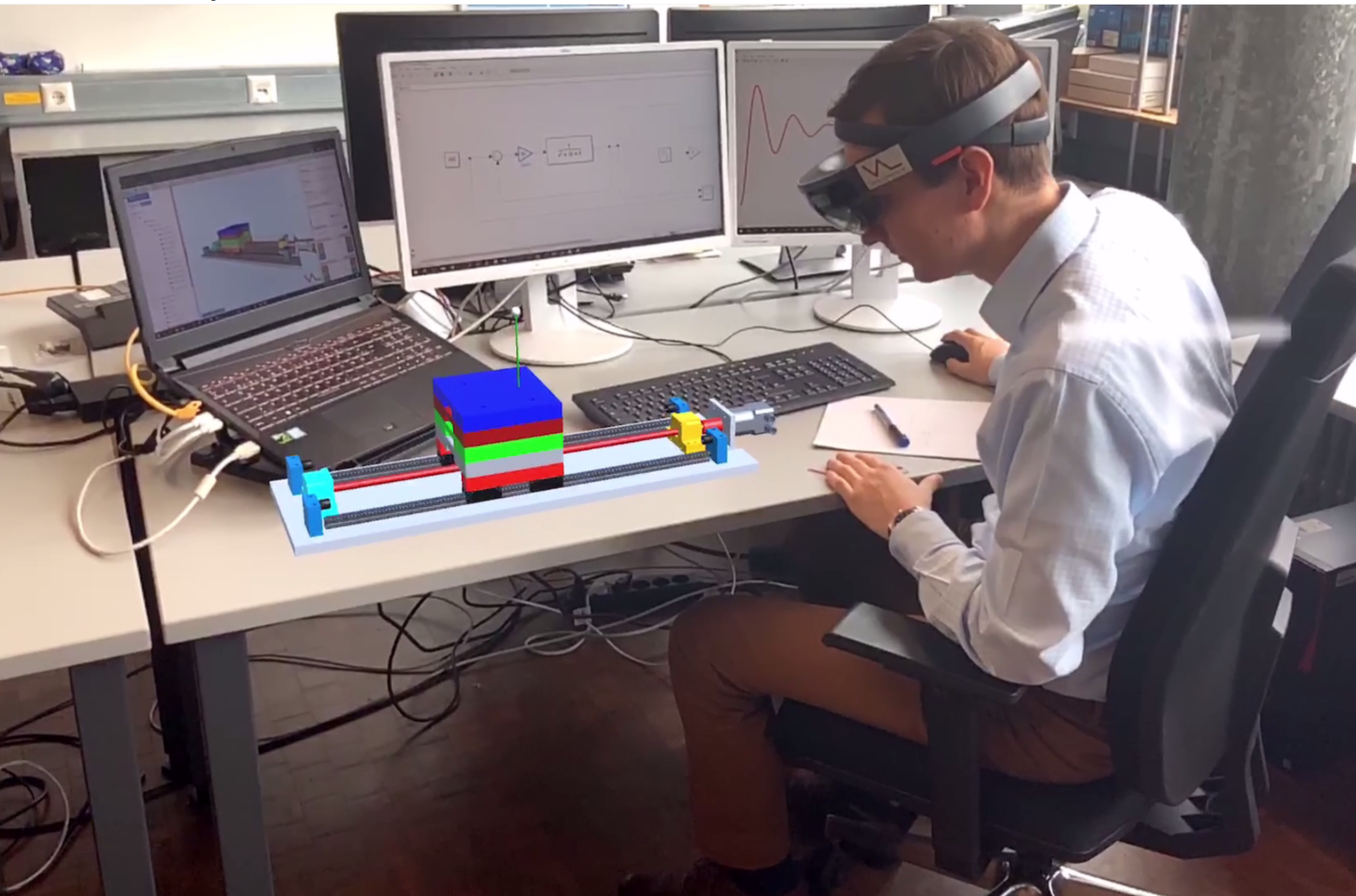
- Visualisierung, Augmented Reality und Virtual Reality
In der begleitenden Laborübung erstellen die Studierenden im Rahmen eines Laborprojekts selbständig einen Digitalen Zwilling eines Robotersystems unter Anwendung von neuartigen Informationstechnologien wie bspw. Web-Technologien, Augmented Reality und Virtual Reality.
Weitere Informationen für Studierende: