Regelungstechnik 1
Bachelor Maschinenbau
Die Lehrveranstaltung Regelungstechnik 1 behandelt die Grundlagen der Regelungstechnik mit folgenden inhaltlichen Schwerpunkten:
- Dynamische Systeme im Zeit- und Bildbereich
- Beschreibung von Regelkreisen, Übertragungsglieder und Blockschaltbilder
- Regelkreisanalyse im Zeit- und Frequenzbereich
- Reglerentwurf, Regelkreisstabilität und Frequenzkennlinienverfahren
- Kaskadenregelung
- Rechnerübung Computer Aided Control Engineering (CACE)
- Laborübungen
Weitere Informationen für Studierende
Virtual Automation [NEU!]

Bachelor Maschinenbau
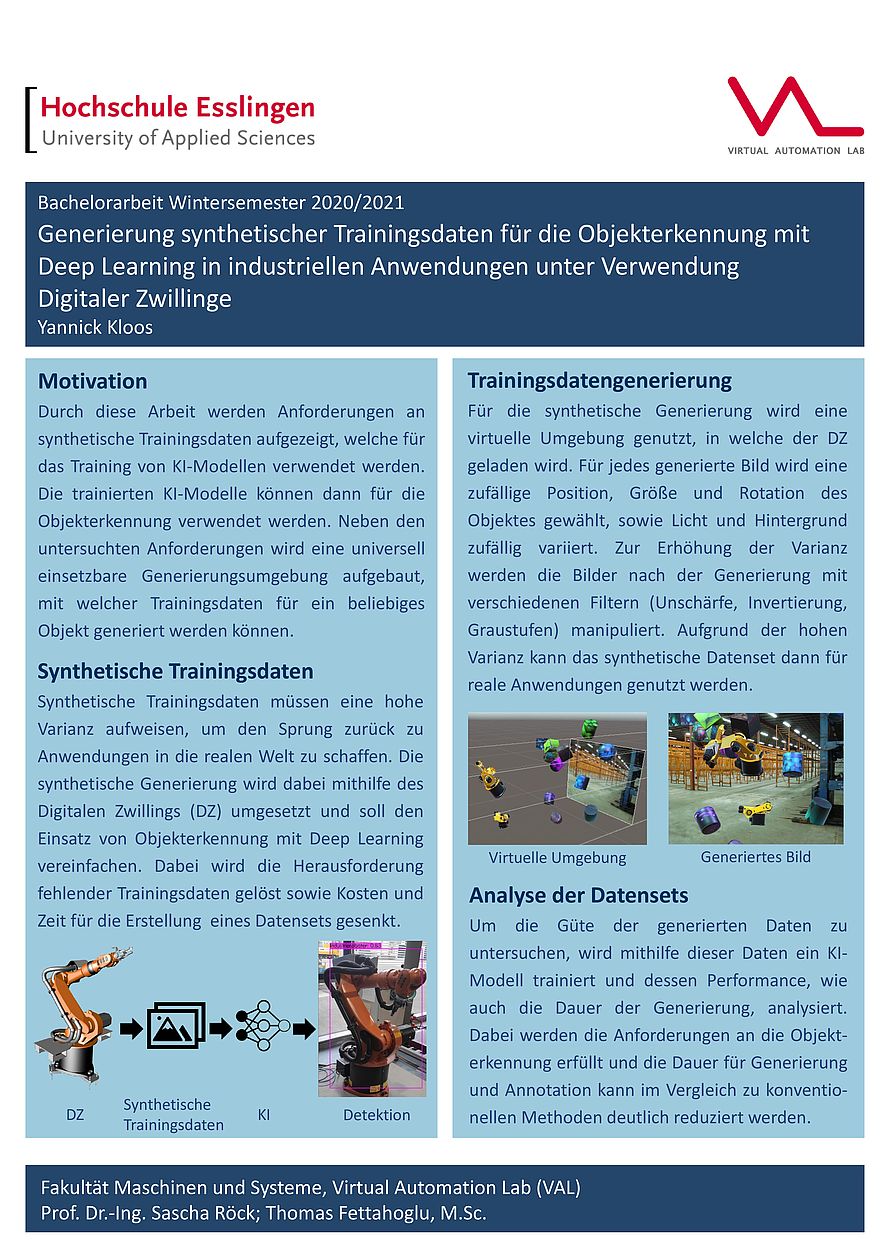
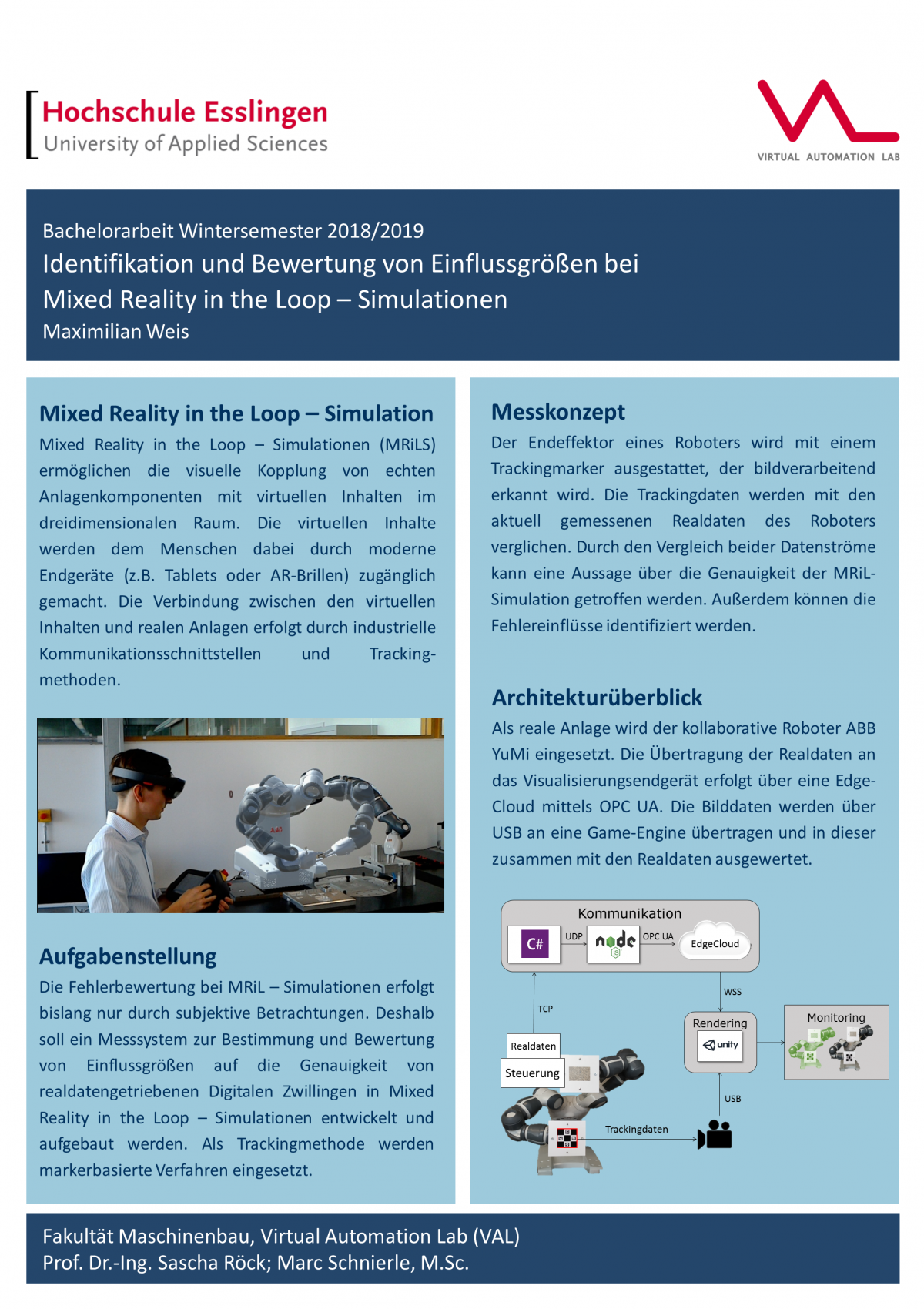
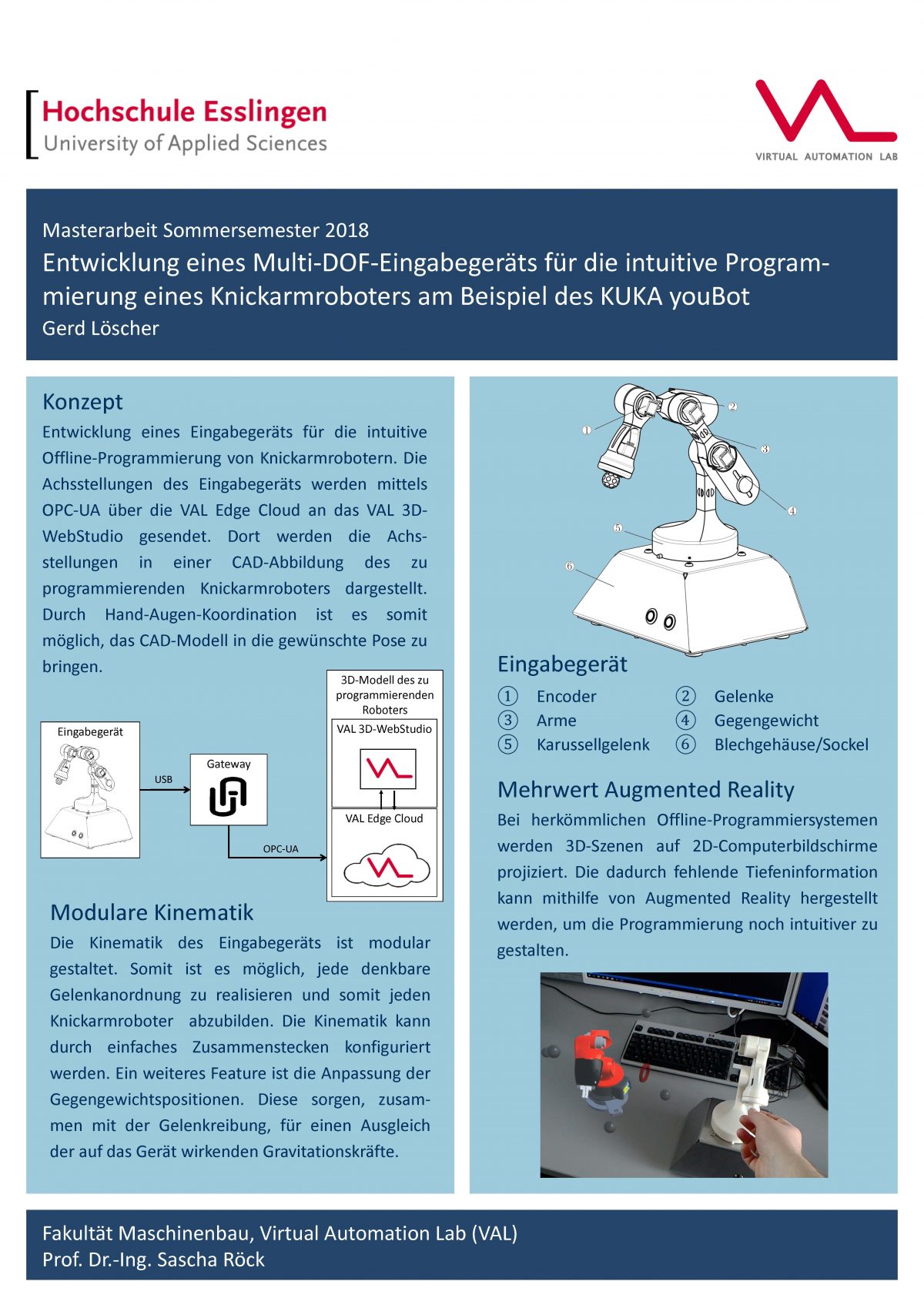
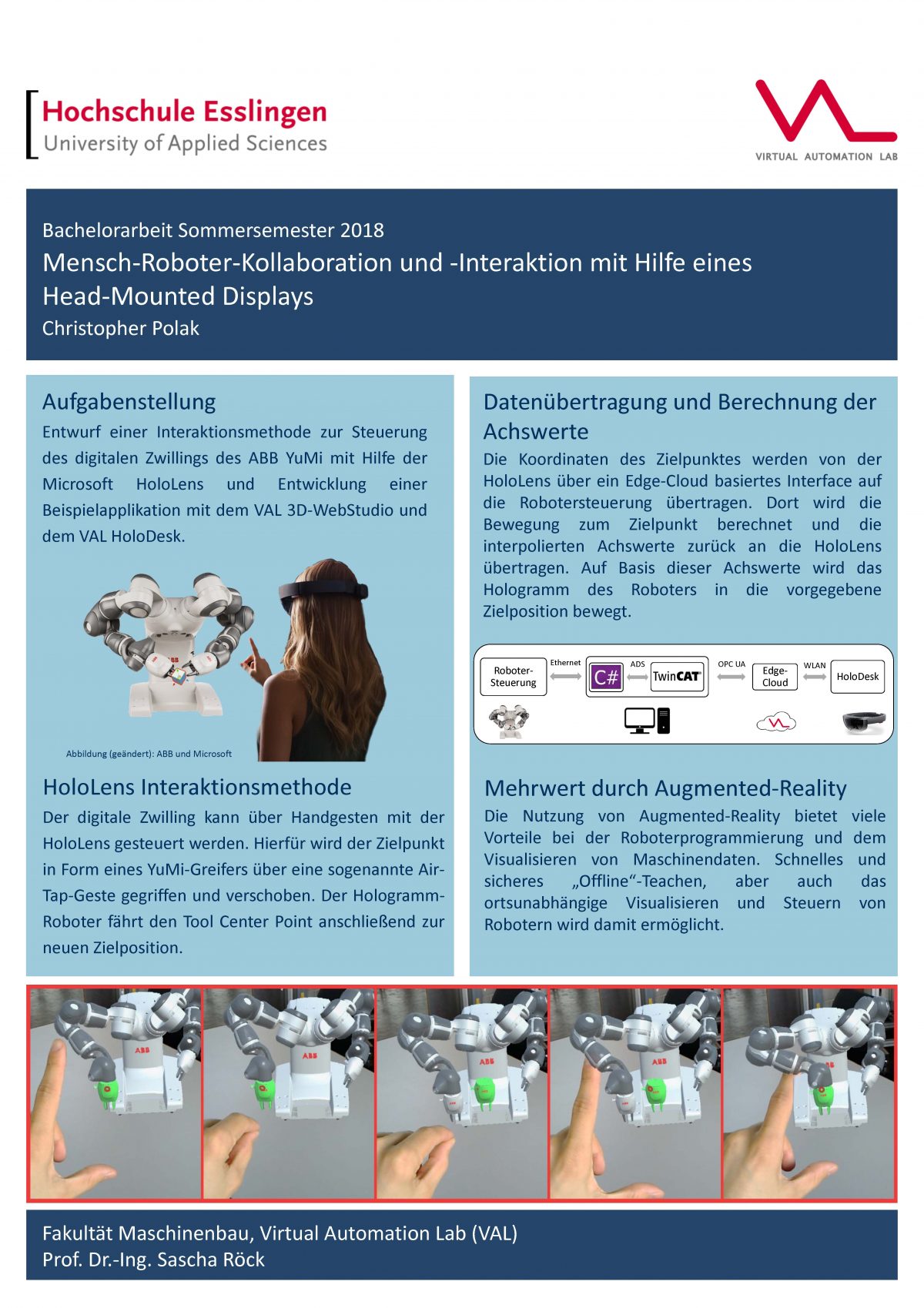
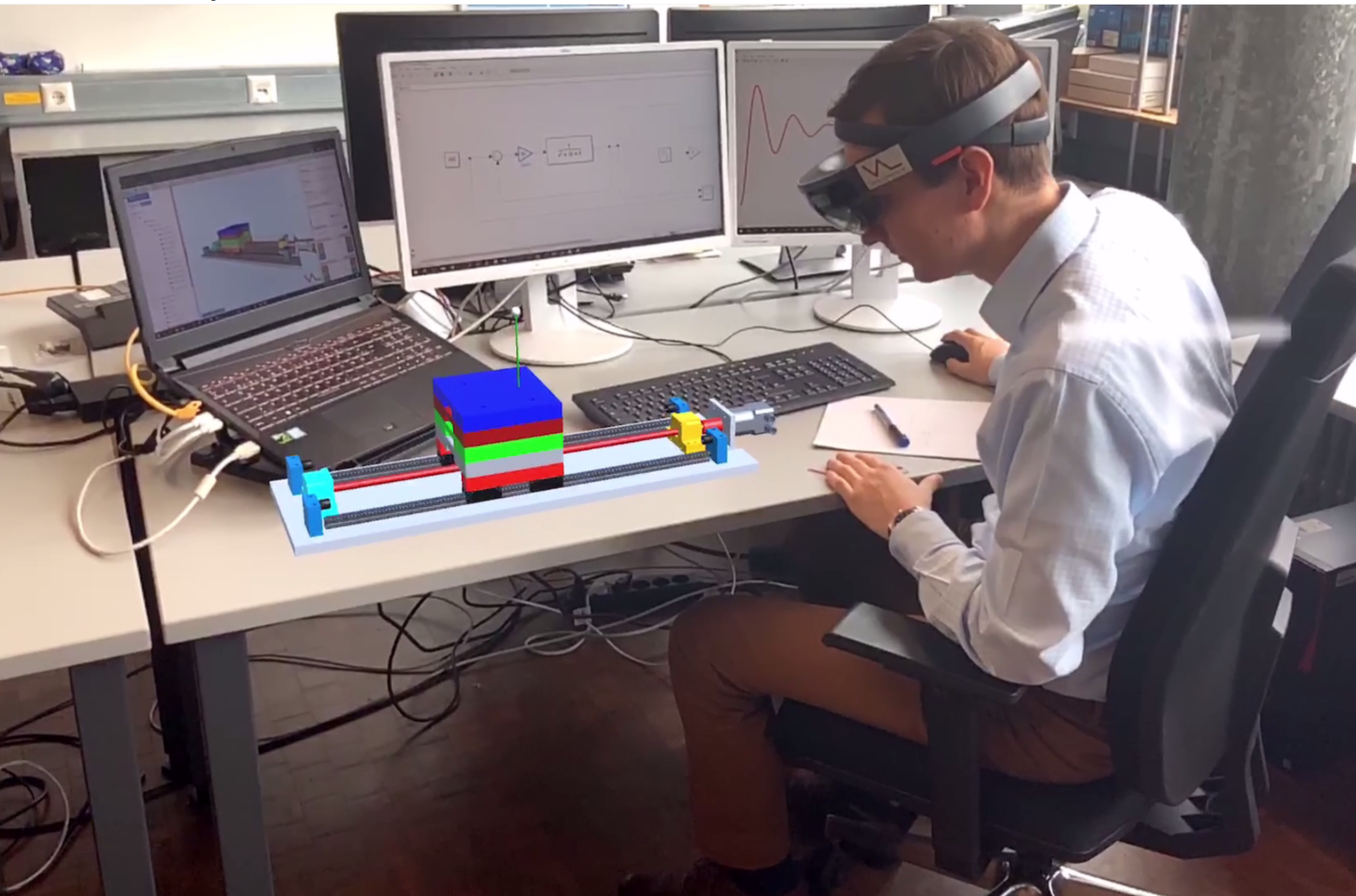
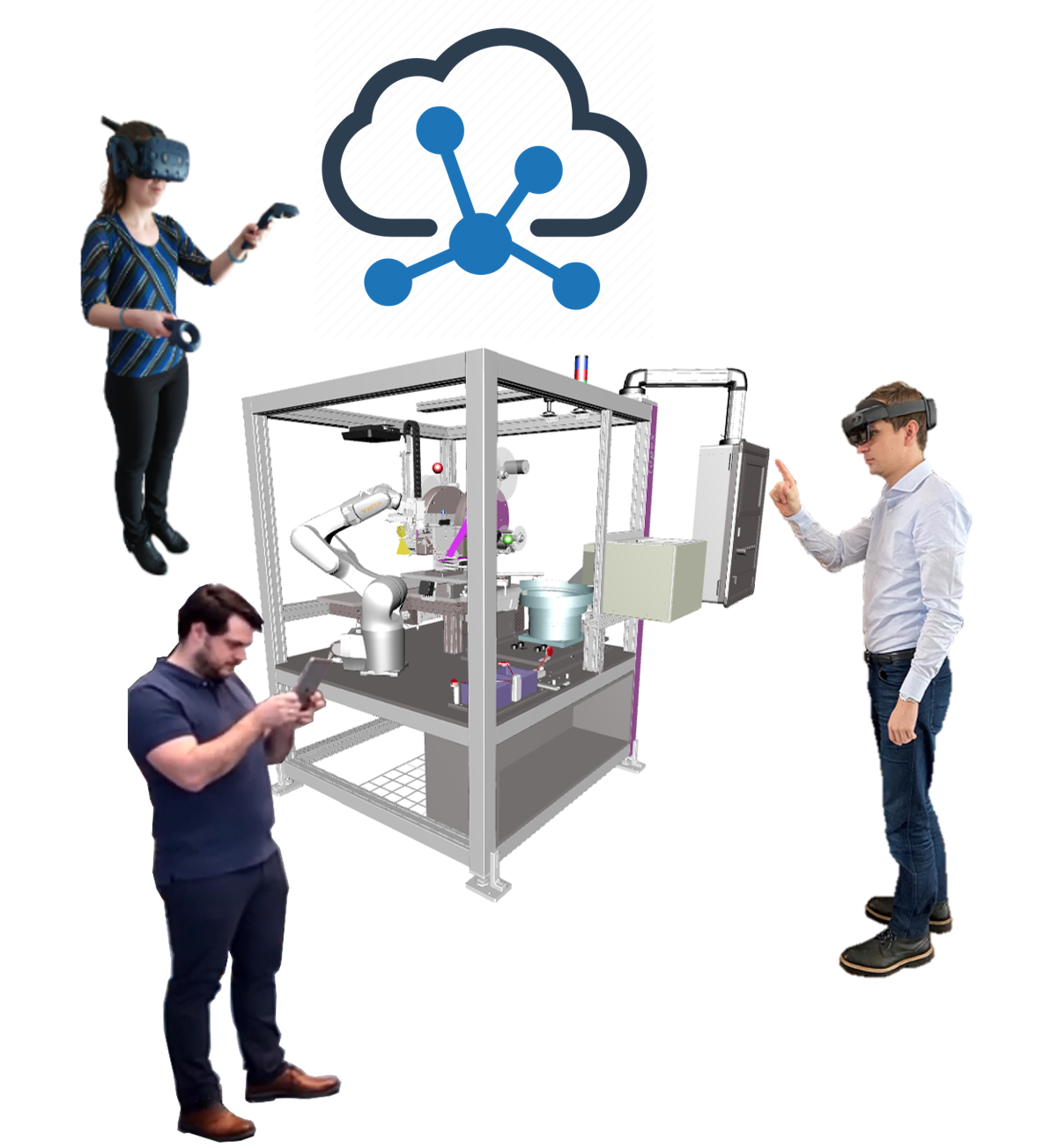
Die Lehrveranstaltung Virtual Automation ist Bestandteil des Studienschwerpunkts Smart Automation. Es werden Inhalte zur Digitalisierung und Simulation von Maschinen und Anlagen im Kontext Industrie 4.0 behandelt:
- X-in-the-Loop-Simulationsmethoden
- Echtzeitsimulation
- Realdaten- und Steuerungskopplung, Zeitsynchronisation
- Modellierungsmethoden
- Numerische Aspekte unter Echtzeit und Echtzeitmodelle
- Digital Twin as a Service und Mixed-Reality-in-the-Loop Simulation
- Laborübungen
Weitere Informationen für Studierende:
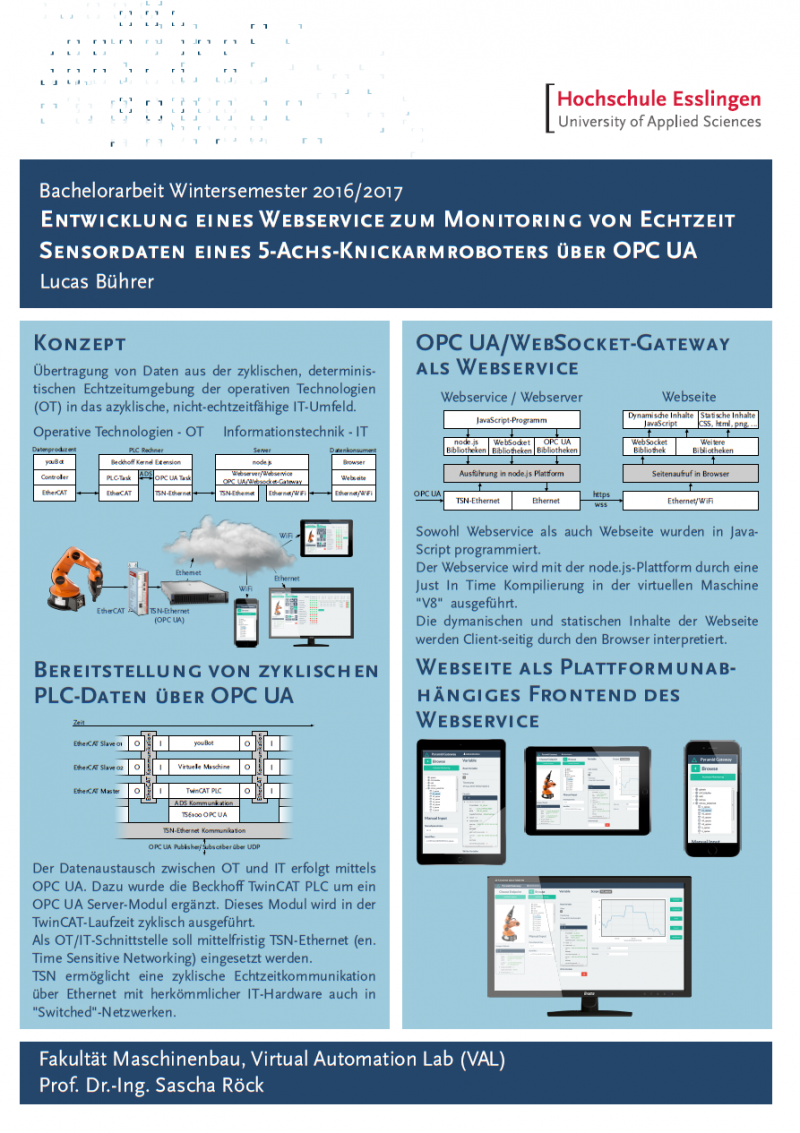
Softwaretechnologien in der Automation [NEU!]
Bachelor Maschinenbau
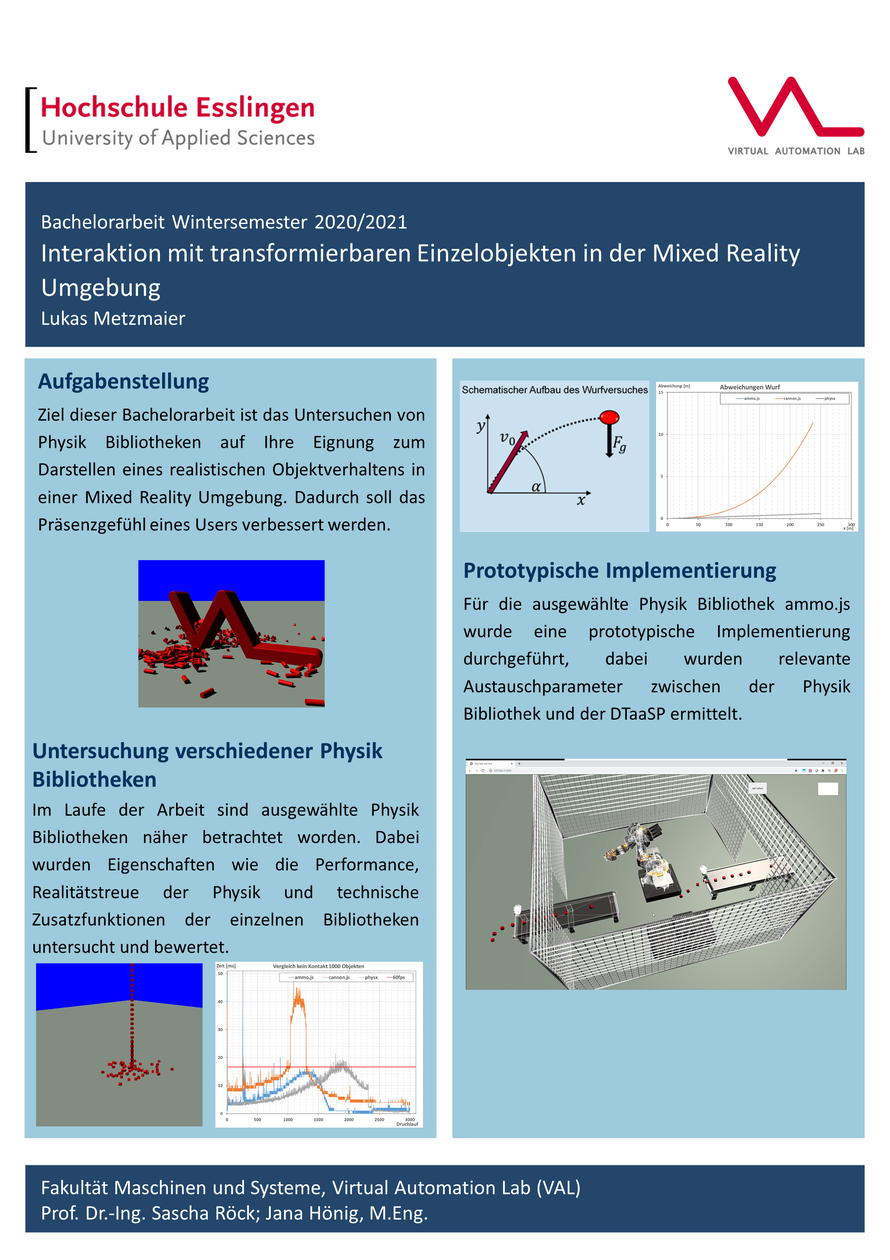
Die Lehrveranstaltung Softwaretechnologien in der Automation ist Bestandteil des Studienschwerpunkts Smart Automation. Es werden Inhalte zu modernen Informationstechnologien im Kontext Industrie 4.0 behandelt:
- Prinzipien der Softwaretechnik
- Grundlagen von Rechnernetzwerken
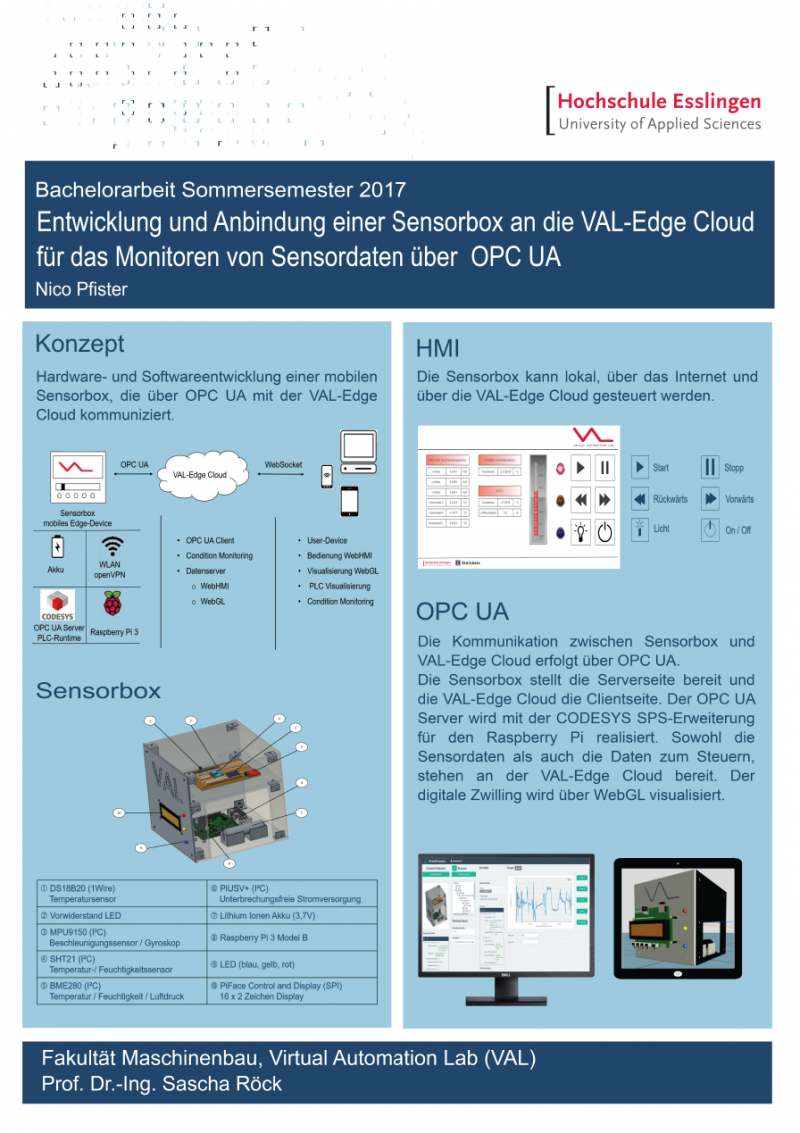
- Plattformunabhängige Kommunikationssysteme (z.B. OPC UA)
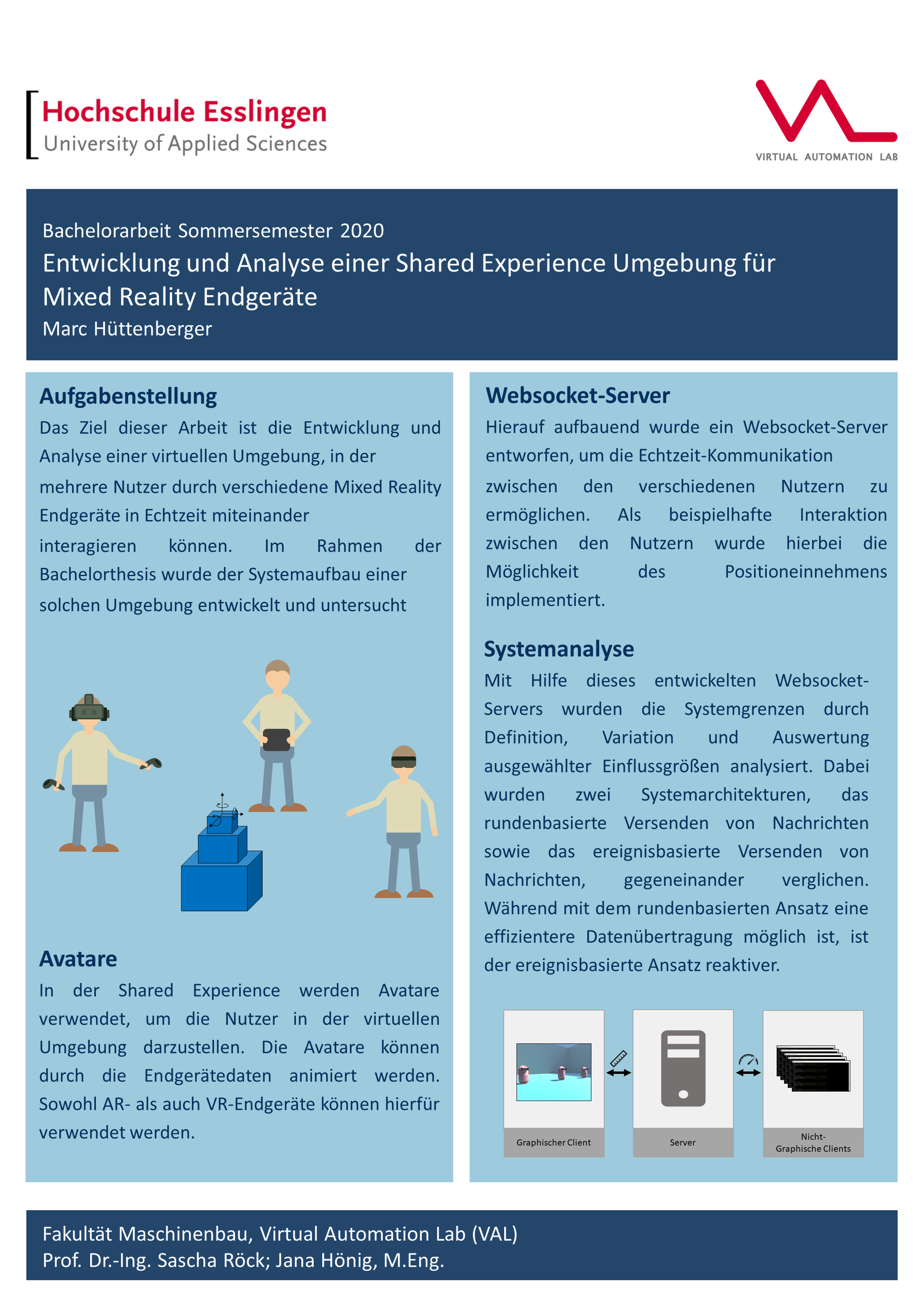
- Server-Client Architektur von Web-Anwendungen
- Browser-Applikationen (Frontend), Webserver und Microservices (Backend)
- Kommunikationskonzepte der Web- und Cloudtechnologien
- Grundlagen der Datenbanksysteme
- Laborübungen
Weitere Informationen für Studierende:
Regelsysteme im Zustandsraum
Master Ressourceneffizienz im Maschinenbau
Die Lehrveranstaltung Regelsysteme im Zustandsraum baut auf den Regelungstechnik Grundlagen auf und behandelt die Regelung von Mehrgrößensystemen:
- Beschreibung dynamischer Systeme im Zustandsraum
- Zustandsrückführung und Führungsgrößenaufschaltung
- Entwurfsmethoden für Zustandsregler wie Polvorgabe und Optimale Regelung (LQ-Regler)
- Zustandsregelung mit Integral-Regler
- Zustands-Beobachter
Weitere Informationen für Studierende:
Roboter-Digitalisierung und Simulation
Master Ressourceneffizienz im Maschinenbau
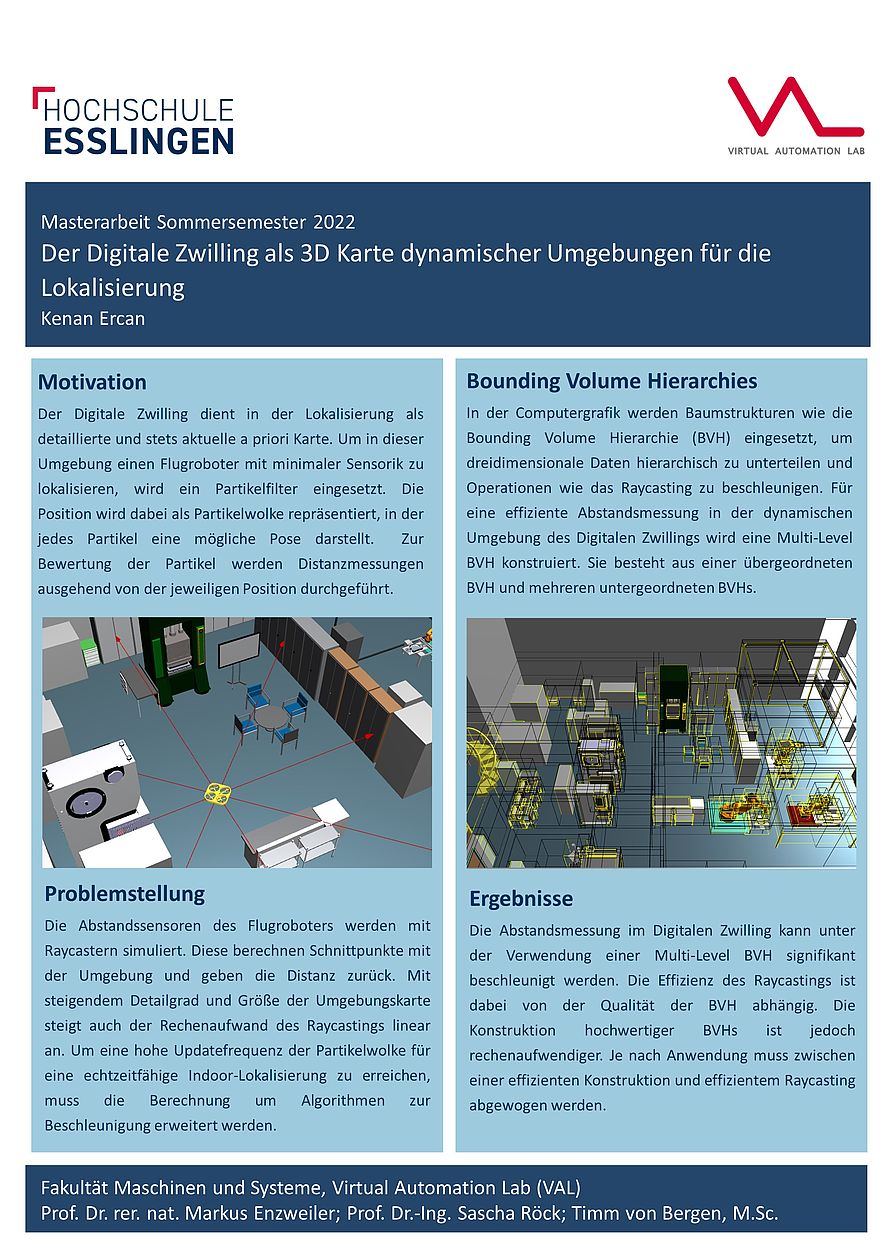
In der Lehrveranstaltung werden moderne Methoden der autonomen Robotik in einer Smart Factory an Beispielen aus der autonomen Indoor-Flugrobotik betrachtet. Dabei werden folgende Themen im Kontext der autonomen Robotik behandelt:
- Kinematische Modellierung
- Trajektorienplanung, Steuerung und Regelung
- Lokalisierungs- und Navigationsmethoden
- Software- und IT-Frameworks
In der begleitenden Laborübung wenden die Studierenden die Methoden an praktischen Beispielen realer Indoor-Flugrobotik-Anwendungen an.
Weitere Informationen für Studierende: