»
spektrum 46/2018
WISSENSCHAFT
34
Im Rahmen des neuen Konzepts wird der
E-Motor der Abtriebswelle durch zwei E-
Maschinen ersetzt. Diese wirken direkt
auf die Antriebsräder, wodurch ein ide-
ales Torque Vectoring ermöglicht wird.
Der mechanische Zweig wirkt weiterhin
über das Differential. Die Hardware des
abgewandelten Antriebskonzepts, wel-
ches den kompletten Antriebs-strang des
Modellfahrzeugs darstellt, wurde anhand
von zwei Vorgängerprojekten konzipiert
und eigenständig aufgebaut. Insgesamt
beläuft sich die Bearbeitungszeit des Pro-
jekts somit auf drei Jahre. In Abbildung 1
ist der schematische Aufbau des entwi-
ckelten Modellfahrzeuges dargestellt.
Da die Steuerung und Regelung des Ver-
brennungsmotors eine aufwändige und in
diesem Projekt nebensächliche Komplexität
aufweist, wird dieser durch einen E-Motor
ersetzt. Um das Verhalten eines Verbren-
nungsmotors im Bestpunkt entsprechend
zu simulieren, wird die Drehzahl des E-Mo-
tors konstant gehalten. Es wird allerdings
eine Variation der Drehzahl vorbehalten,
um mögliche Betriebszustände, wie bei-
spielsweise das Boosten, zu realisieren.
REALISIERUNG UND TESTEN
DES TORQUE VECTORINGS IM
FAHRZEUG
Mittels einem eigens dafür programmier-
ten C-Code wird das Fahrzeug angesteuert
und die Torque-Vectoring-Strategie imple-
mentiert. Die dazu benötigten Gas- und
Lenksignale der Funkfernbedienung wer-
den durch Verwendung eines Arduinos eingelesen. Der Arduino
dient hierbei als zentrale Recheneinheit des Hybridsystems.
Bei der Torque-Vectoring-Strategie wird in Abhängigkeit der Soll-
fahrgeschwindigkeit (Gassignal) und des gewünschten Lenkwin-
kels (Lenksignal) das Antriebsmoment individuell auf die Hinter-
räder verteilt. Dadurch erreicht man ein resultierendes Moment,
welches eine einlenkende Wirkung des Fahrzeuges erzeugt.
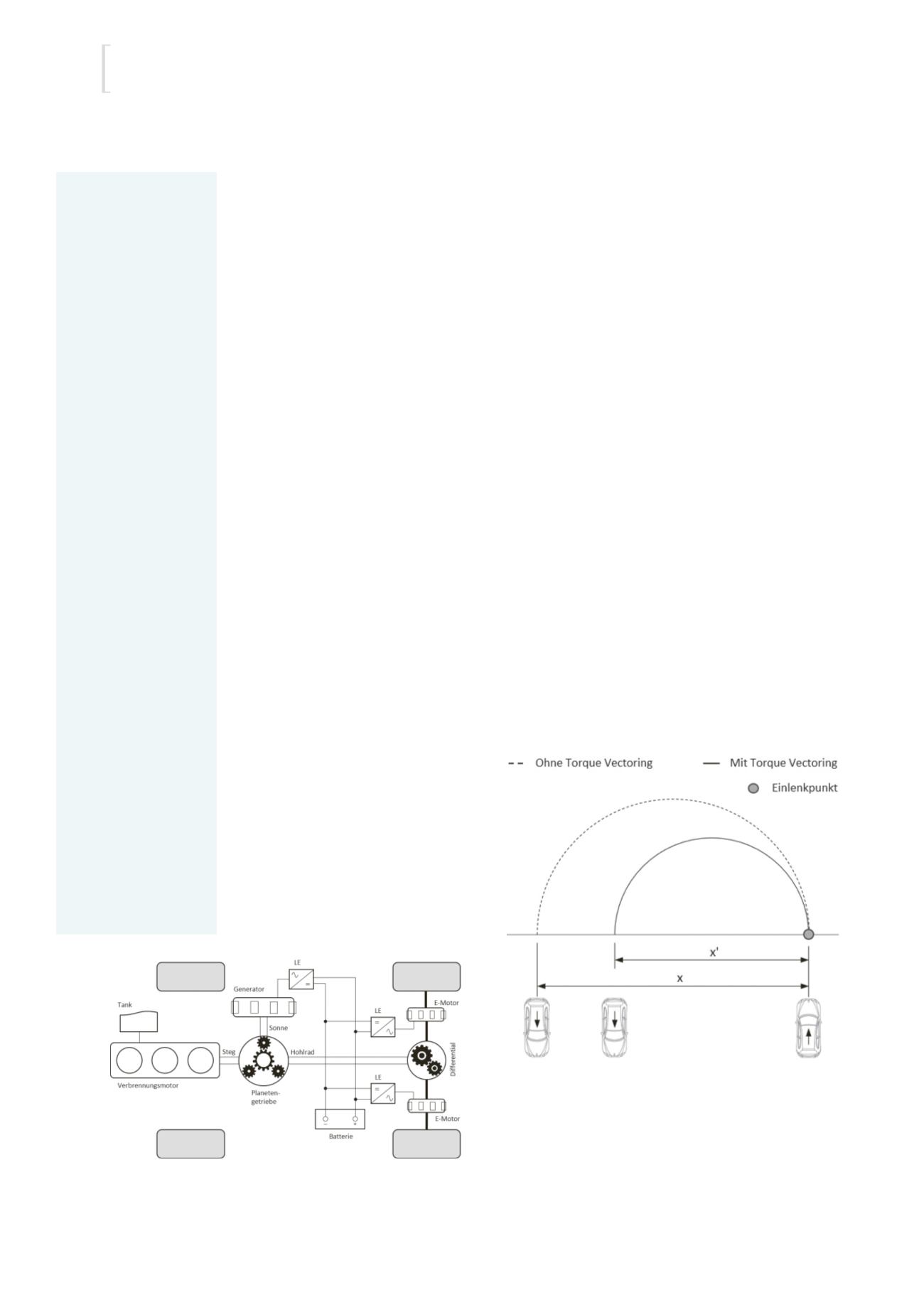
Für das Testen und Applizieren des Torque Vectorings wird eine
Linkskurve mit konstantem Radlenkwinkel und konstanter Ge-
schwindigkeit gefahren, siehe Abbildung 2. Dieses Testmanöver
wird sowohl mit als auch ohne Torque Vectoring Strategie mehr-
fach durchgeführt. Abgebildet sind die qualitativ zu erwartenden
Kreisbahnen mit und ohne Torque Vectoring und den dazugehö-
rigen Durchmessern x bzw. x‘.
Aus den mehrfach durchgeführten Testfahrten nach abgeschlos-
sener Applikation ergeben sich die in Tabelle 1 aufgelisteten
Messwerte. Hierbei ist jeweils der maximale sowie minimale
Durchmesser angegeben. Die Messgröße x‘ beschreibt den be-
fahrenen Kurvendurchmesser unter Verwendung der Torque
Vectoring Strategie. Analog dazu beschreibt x den Durchmesser
ohne Nutzung von Torque Vectoring. Es ergibt sich im Mittel eine
Verringerung des Kurvenradius um etwa 30 %. Die Verbesserung
bezieht sich auf das im Projekt verwendete Modellfahrzeug und
das beschriebene Fahrmanöver.
Abb. 2: Testmanöver – Linkskurve mit konstantem Radlenkwinkel und konstanter Ge-
schwindigkeit, mit und ohne Torque Vectoring [2]
VORTEILE DES HYBRIDANTRIEBSKONZEPTS
Neben den herkömmlichen Vorteilen eines hybriden Antriebs-
konzepts besitzt dieses abgewandelte Konzept weitere Vorteile.
Prof. Dipl.-Ing. Werner
Klement
lehrt an der
Hochschule Esslin-
gen in der Fakultät
Fahrzeugtechnik. Von
Ihm stammt die Idee
zur Erweiterung des
Toyota Hybrid Systems
und der damit einher-
gehenden Steigerung
des Funktionsumfan-
ges um das Torque
Vectoring. Er erkannte
die Vorteile des er-
weiterten Systems
und legte somit den
Grundstein für das
Forschungsprojekt im
Masterstudiengang
Fahrzeugtechnik.
Patrick Hörner, Adrian
Ibrahim, Kevin Karrer,
Steffen Lenz
(alle B.
Eng. der Hochschule
Esslingen) studieren
im Masterstudien-
gang Fahrzeugtechnik
an der Hochschule
Esslingen mit dem
Schwerpunkt „Fahr-
werk und Regelsyste-
me“. Sie behandeln
das Thema in ihrem
zweisemestrigen For-
schungsprojekt. Die
Idee zur Umsetzung
in einem Modellfahr-
zeug stammte von
einer der ersten zwei
Projektgruppen, die
das Thema als For-
schungsprojekt behan-
delten. Das aktuelle
Projektteam kümmerte
sich um die Software
und Elektronik im
Fahrzeugmodell, sowie
um eine medienwirk-
same Dokumentation
(siehe Video).
Abb. 1: Schematischer Aufbau – Antriebskonzept des Modellfahrzeuges [2]


